Das Programmieren von Robotern ist jetzt am Monitor möglich. Ebenso gibt es Möglichkeiten, die Installation für die am Roboter arbeitenden Personen sicherer zu machen. Reis Robotics konzipierte eine Software, mit der ein Roboter grafisch programmiert und simuliert werden kann sowie eine Sicherheitssteuerung für Roboter, die über Software frei konfigurierbar ist und personen-sicher arbeitet.
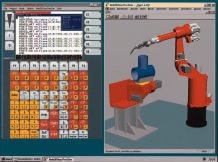
Mit den Softwaremodulen Rob Office und Pro Sim ist es möglich, einen Roboter in einer virtuellen Arbeitsumgebung grafisch zu programmieren und zu simulieren.
Beide Module sind über eine RRS II-Schnittstelle miteinander verbunden. Rob Office stellt dabei eine fotorealistische Abbildung des Programmierhandgerätes auf dem PC-Bildschirm dar, während Pro Sim gleichzeitig die Roboterzelle in dreidimensionaler Darstellung in einem separaten Fenster abbildet.
Sämtliche Steuerungsfunktionen wie etwa Programmeingabe, Programmablauf, Bewegungssteuerung laufen in Rob Office unter den gleichen Bedingungen wie in der realen Steuerung eines Roboters ab. Somit erhält man verlässliche Aussagen über Programmverarbeitung, Taktzeiten und Erreichbarkeit von Positionen. Pro Sim visualisiert dabei die Roboterbewegungen und führt eine Kollisionskontrolle durch.
Die Roboterprogramme werden in Rob Office erstellt, wobei mittels Pro Sim auch Roboterpositionen aus der virtuellen Arbeitszelle, z.B. konstruktive Punkte am Werkstück, direkt in Rob Office übernommen werden können.
Darüber hinaus kann mit Pro Sim die Arbeitszelle über die integrierten CAD-Funktionen modelliert werden. Reis-Standardmodule, wie alle Roboterkinematiken, die Peripherieachsen und die gängigsten Werkzeuge, können aus einer mitgelieferten Bibliothek importiert werden. Ebenso können 3D-Modelle von Werkstücken aus 3D-CAD-Systemen übernommen werden.
Da das Einrichten und die Programmierung von Industrierobotern mit aktiven Antrieben erfolgt, stellt der Roboter eine potenzielle Gefahr für die daran arbeitenden Personen dar.
Das Prinzip der Sicherheitssteuerung beruht darauf, dass zusätzlich zur eigentlichen Robotersteuerung ein „Safety Controller“ vorhanden ist, der Vorgaben und Ergebnisse der Robotersteuerung überprüft, die aktuelle Position bzw. Bewegung des Roboters überwacht und bei einem inkonsistenten Zustand die Anlage still legt.
Der Safety Controller bildet das zentrale Sicherheitselement der Robotersteuerung und ist als eigenständiges Gerät im Schaltschrank der Steuerung untergebracht. Er dient zur Überwachung des eigentlichen Steuerungsrechners und aller Servoregler. Er ist zu jedem Zeitpunkt über den Zustand der Steuerung und über Position und Geschwindigkeit des Roboters informiert.
Da sämtliche Überwachungsfunktionen per Software realisiert sind, kann der Safety Controller aus den Achsstellungen des Roboters die kartesische Position des Werkzeugflansches im Arbeitsraum des Roboters berechnen. Durch die softwaretechnische Realisierung kann auf teuere Sicherheitskomponenten wie zum Beispiel Sicherheitsschalter verzichtet werden.
Die wichtigsten Sicherheitsfunktionen im Überblick
Kartesische Schutzzonen
Durch einfaches Einlernen können Schutzzonen definiert werden, innerhalb derer sich der Roboter bewegen darf. Bei Verlassen des Schutzbereiches wird der Roboter stillgesetzt.
Achsspezifische Bereichsüberwachung
Peripherie- oder Roboterachsen können in ihrem Bewegungsraum eingeschränkt und überwacht werden.
Safe-Position
Für Wartungsarbeiten oder beim manuellen Beschicken einer Station steht der Roboter auf einer vordefinierten Sicherheitsposition (Safe-Position). In konventionellen Lösungen bedämpft der Roboter hierbei einen Sicherheitssensor, der beim ungewollten Verlassen dieser Position den Roboter stillsetzt.
Stillstandsüberwachung
Roboter- und Peripherieachsen können an jeder beliebigen Position auf sicheren Stillstand überwacht werden. Sollte der Roboter unbeabsichtigt seine Position verlassen, wird er stillgesetzt.
Kartesische Geschwindigkeitsüberwachung des Roboterwerkzeugs im Raum
Die kartesische Geschwindigkeit des Roboterwerkzeuges im Raum wird auf eine maximale Geschwindigkeitsgrenze von z.B. 250 mm/s überwacht.
Geschwindigkeitsüberwachung von einzelnen Achsen
Jede einzelne Roboter- oder Peripherieachse kann auf eine maximale Geschwindigkeitsgrenze überwacht werden. Bei Überschreiten wird die Anlage stillgelegt.
Bremsrampenüberwachung
Beim Stoppen des Roboters durch den Bediener bremst der Roboter mit einer definierten Bremsrampe ab. Der Safety Controller überwacht Verlauf und Zeitdauer der Bremsrampe und schaltet bei einem unerwarteten Verlauf der Bremsrampe die Leistung des Roboters ab.
Reis GmbH & Co63777 ObernburgZum Unternehmen
Teilen:







{kind=link}