

Mit der wachsenden Popularität von FTS, AMR und Co. stehen Hersteller und Betreiber von Lagern und Distributionszentren vor komplexen Herausforderungen. Um verschiedene Transportaufgaben in einem Layout zu automatisieren, benötigen sie mehrere FTS- oder AMR-Systeme unterschiedlicher Hersteller. Die Koordination verschiedener Fahrzeugmarken mit individuellen Steuerungslösungen erschwert dabei den effizienten Einsatz der Fahrzeuge. Die Interoperabilität der Systeme ist daher ein drängendes Thema in der Intralogistik.
Initiativen wie VDA 5050 oder der amerikanische Massrobotics Standard, aber auch verschiedene Softwareunternehmen arbeiten daran, eine Standardisierung zu etablieren, die dieses Problem löst. Der Fokus auf die Flottensteuerung greife aber zu kurz, findet Julian Seume, ehemals CSO von Wiferion und jetzt Direktor der PULS Wireless Businessunit. Der Anbieter von DIN-Schienen-Stromversorgungen hatte das Geschäft von Wiferion im Oktober 2023 übernommen und plant große Investitionen in die drahtlose Ladetechnologie. „Wenn gemischte Roboterflotten in Zukunft schnell skalieren sollen, muss Interoperabilität ganzheitlich betrachtet werden. Dazu gehört auch, dass die Transportroboter mit einer einheitlichen und standardisierten Infrastruktur betrieben werden können.“ Die Energieversorgung spielt dabei eine zentrale Rolle.
Komplexe Ladeinfrastruktur als Hindernis
Wie bei der Flottensteuerung gibt es auch bei den mobilen Transportrobotern derzeit keinen Standard für die Energieversorgung. Jeder Hersteller stattet seine Geräte mit einer eigenen Ladelösung aus. Von Batterieladesystemen mit Schleifkontakten über im Boden integrierte induktive Stromleiter bis hin zu Ladekonzepten mit Steckkontakten ist alles dabei. In der Praxis müssen Anwender, die gemischte Flotten betreiben, für jeden Hersteller eine eigene Ladeinfrastruktur aufbauen, da die Ladegeräte untereinander nicht kompatibel sind. „Das erhöht nicht nur die Komplexität und Fehleranfälligkeit der gesamten Anlage, sondern auch die Kosten für Installation und Wartung redundanter Energiesysteme“, erklärt Seume.
Müssen mehrere Ladezonen mit unterschiedlichen Ladetechnologien installiert werden, geht zudem Hallenfläche verloren, die nicht mehr für wertschöpfende Prozesse genutzt werden kann. Auch wenn sich Roboter zukünftig einfach über eine Schnittstelle wie die VDA 5050 steuern lassen, verhindert die ausufernde Ladeinfrastruktur eine einfache Skalierung der Flotten.
Harmonisierung als Lösung
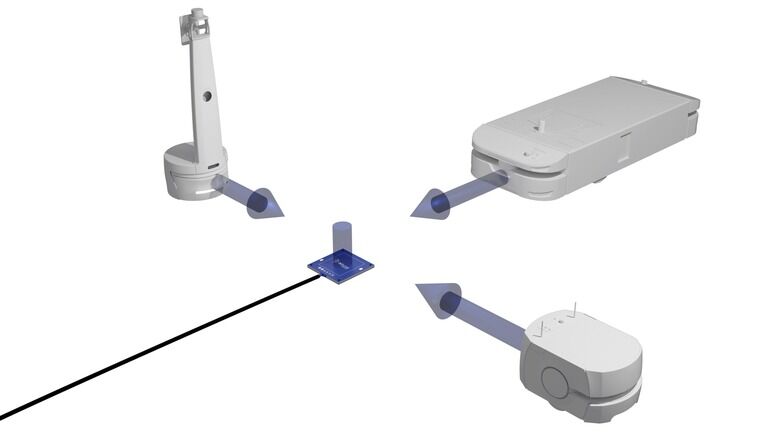
Eine Lösung des Problems sehen die Experten im kabellosen Laden mit induktiven Punktladegeräten wie beispielsweise dem etaLink-System von Wiferion. „Mit unseren Schnellladesystemen gehört das Durcheinander von verschiedenen Steckern und Ladekontakten im Lager der Vergangenheit an“, erklärt Energiespezialist Seume. Denn etaLink überträgt die Energie magnetisch und berührungslos zur Fahrzeugbatterie. Physikalische Ladeschnittstellen werden demnach nicht benötigt. Fährt ein Roboter an den Ladepunkt, startet der Ladevorgang dem Unternehmen zufolge innerhalb einer Sekunde. Dabei soll das Ladesystem alle gängigen Spannungen und Ladeströme erzeugen können. Wodurch jedes batteriebetriebene Fahrzeug an einem Ladepunkt aufgeladen werden kann – egal, ob es sich um einen Gabelstapler, einen mobilen Roboter oder einen Handhubwagen handelt.
Auch der Hersteller oder die eingebaute Batterie spielen dem Spezialisten zufolge keine Rolle. Die Fahrzeuge müssen lediglich über eine Empfangselektronik verfügen, die mit wenigen Handgriffen integriert werden kann. So lässt sich Interoperabilität bei der Energieversorgung realisieren, denn jedes Fahrzeug auf dem Shopfloor wird mit der gleichen Technologie versorgt. „Das zentrale Argument für Wireless Charging als neuen Standard für die Energieversorgung industrieller Elektrofahrzeuge ist seine Einfachheit. Es benötigt weniger Technik, weniger Platz, ist robust und erhöht gleichzeitig die Produktivität jedes einzelnen Fahrzeugs“, betont Seume.
Wirtschaftlicher Betrieb und Skalierbarkeit
Neben der Harmonisierung der Ladeinfrastruktur bietet die kabellose Ladetechnologie weitere Vorteile. So soll das Zwischenladen der Fahrzeugbatterien im laufenden Prozess realisiert werden können. Anstatt zu einer externen Batterieladestation zu fahren, werden die Fahrzeuge beim sogenannten „In-Process-Charging“ während ihres Workflows an häufig frequentierten Punkten im Lager oder in der Produktion mit Energie versorgt, ohne die logistischen Prozesse für Ladepausen zu unterbrechen. So können die Roboter selbst Stopps von wenigen Sekunden, z. B. an einer Übergabestation, für eine Zwischenladung nutzen. So steigert Wiferion die Produktivität der Flotte eigenen Angaben zufolge um bis zu 32 Prozent. „Mit unserer Technologie benötigen die Roboter weniger Batteriekapazität. Die verbauten Akkus können deutlich kleiner dimensioniert werden, was wertvollen Bauraum freisetzt und die Kosten des Energiesystems und damit des gesamten Fahrzeugs senkt“, führt Seume aus. Zudem würde die bei anderen Ladekonzepten notwendigen Ladezonen entfallen. Da induktive Punktladegeräte ohne mechanische Schleifkontakte auskommen, seien sie praktisch wartungsfrei. Probleme herkömmlicher Ladeverfahren mit oxidierten Steckern oder gebrochenen Kabeln sollen so der Vergangenheit angehören.
Auch bei der Inbetriebnahme kann das induktive Laden gegenüber herkömmlichen Ladekonzepten punkten. „Bei herkömmlichen Systemen dauert die Integration in die Lagerprozesse oft Wochen oder sogar Monate. Mit unserer kabellosen Ladetechnik lässt sich die Automatisierung dagegen innerhalb weniger Tage realisieren“, so der CSO.
Fazit
Der Trend zur Interoperabilität in der Intralogistik ist ungebrochen. Sollen Flotten unterschiedlicher Hersteller effizient betrieben werden, darf der Begriff nicht nur auf die Flottensteuerung beschränkt werden. Ohne standardisierte Hardwareschnittstellen wie bei den Energiesystemen sind gemischte Flotten aufgrund der Komplexität und Unwirtschaftlichkeit einer heterogenen Ladeinfrastruktur laut den Spezialisten nicht sicher skalierbar. (ys)








{kind=link}